10/7/23 – Today, the software side continued on improving our detection for the April Tags, the pixel detection, and field-centric movement. It seems as if the pixels are readily able to detect the different color pixels with an astounding accuracy(0.95 was the numerical value given), but the bounding box around the pixel was a different color. The april tags can also be identified by the camera.
The build team also made significant progress, but they also faced a setback. One of the sides of the software robot, which consisted of the left 2 wheels, broke off upon a collision. The build team fixed the malfunction the screws of the robot.
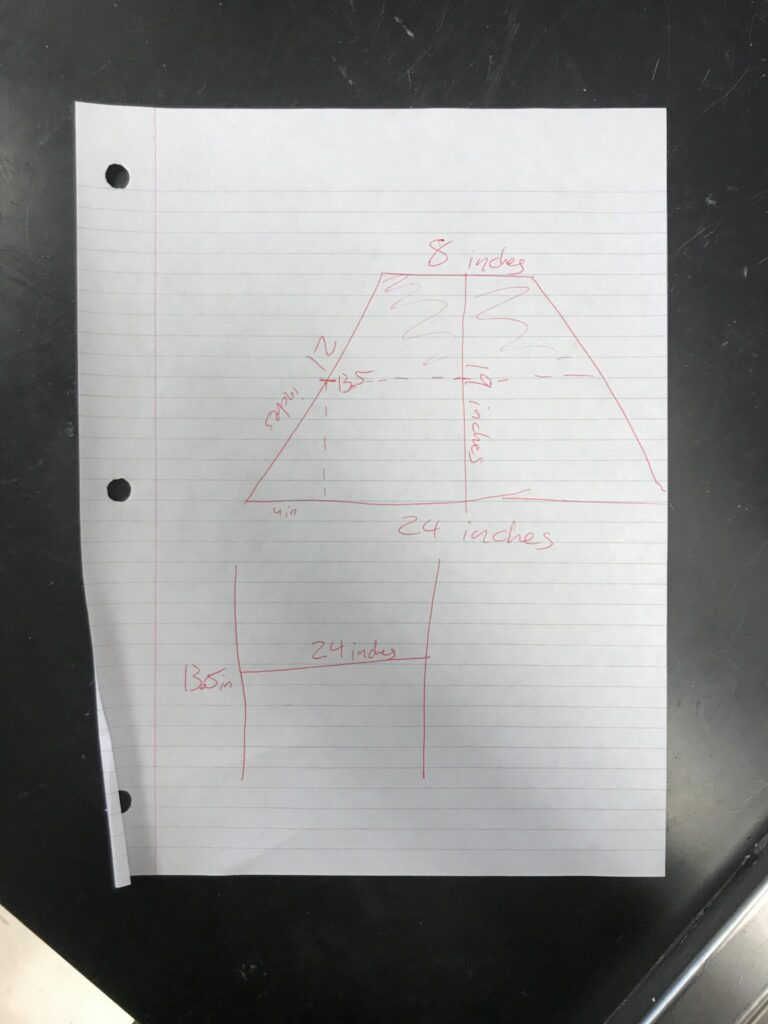
The build team separated the base from last years robot from its top, and tried to find an efficient way to maneuver the robot and allow the robot to traverse the field, particularly under the truss. The following design and test shows the constrains of the robot size and it’s current ability to fit under the truss.